ROBOT SEGUIDOR DE LINEA
NOMBRE DEL PROYECTO
Robot seguidor de linea
MODALIDAD
Trios
TIEMPO
24 horas
DOCENTE
Maria simbaqueba
ESTUDIANTES
-Valentina Ochoa
-Valentina Gantivar
-Luisa Orjuela
CURSO
Noveno A
ÁREA
Informática
FECHA DE INICIO
17 de octubre
FECHA FINAL
7 de noviembre
DESCRIPCIÓN DEL PROYECTO
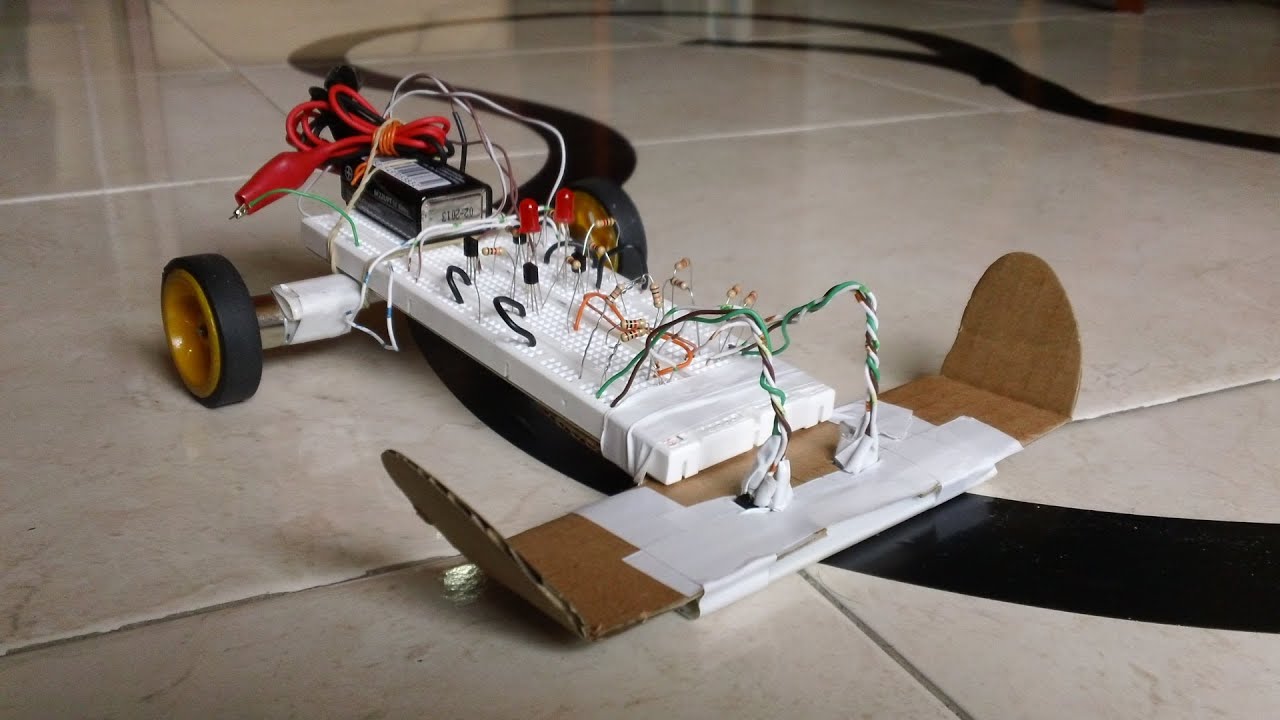
Nuestro proyecto se trata de llegar a la construcción final de un robot seguidor de linea , el cual consiste en
DESCRIPCIÓN DE LOS RECURSOS
Sensores: Un rastreador detecta la línea a seguir por medio de sensores. Hay muchos tipos de sensores que se pueden usar para este fin; sin embargo, por razones de costos y practicidad los más comunes son los sensores infrarrojos (IR), que normalmente constan de un LED inflarrojo y un fototransistor
Motores: El robot se mueve utilizando motores. Dependiendo del tamaño, el peso, la precisión del motor, entre otros factores, éstos pueden ser de varias clases: motores de corriente continua,motores paso a paso o servomotores
Ruedas: Las ruedas del robot son movidas por los motores. Normalmente se usan ruedas de materiales anti-deslizantes para evitar fallas de tracción. Su tamaño es otro factor a tener en cuenta a la hora de armar el robot.
Fuente de energía: El robot obtiene la energía que necesita para su funcionamiento de baterías o de una fuente de corriente alterna, siendo esta última menos utilizada debido a que le resta independencia al robot.
Tarjeta de control: La toma de decisiones y el control de los motores están generalmente a cargo de un microcontrolador. La tarjeta de control contiene dicho elemento, junto a otros componentes electrónicos básicos que requiere el microcontrolador para funcionar
CUIDADOS QUE SE DEBEN TENER EN CUENTA
antes de iniciar el montaje debemos asegurarnos que tenemos disponibles todos los componentes del circuito esto es necesario para no suspender el ensamble.